
1.車用環景系統的簡介
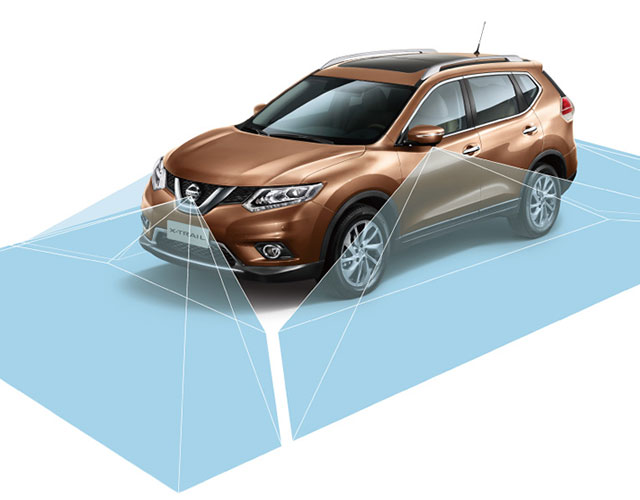
車用環景系統(Around View Monitor System,簡稱AVM) 是一種集合多個廣角相機所拍攝的影像,再透過演算法合成360度全景畫面的技術。這樣的技術在車輛行駛時,能夠提供駕駛人員更全面、車輛立體周邊環境,有效提高駕駛的安全性。此外,車用環景系統還能夠用於車輛的監控(例如特斯拉的哨兵模式)、停車輔助、自動駕駛等多個方面,是現代車輛智能化組成重要部分。
車用環視系統的功能主要分為三類:主要功能、輔助功能、進階功能。
首先是主要功能,包括各種單視圖、2D鳥瞰圖、3D環視圖和倒車輔助線等。
其次是輔助功能,包括除主要功能以外的2D/3D車模顯示、雷達提醒顯示和車輛狀態顯示(車門開關、轉向燈等)。
最後是進階功能,包括色彩一致(減弱環視相機頭輸入圖像亮度/顏色不一致導致拼接圖像存在的「色差」)、車體透明(利用圖像歷史信息填充車底區域)、動態標定(行車過程中實現環視標定)等。
前兩類功能目前在很多車型上都十分常見且成熟,而最後的進階功能則是產品差異化的體現,同時能夠提升用戶的使用體驗。
相關資料來源: https://blog.csdn.net/lwx309025167/article/details/120096776

車用環景系統的組成,主要需要高廣角鏡頭(通常大於170度)、影像合成演算法以及顯示器三大技術的支持。在相機方面,一般需要將多個鏡頭分別安裝在車輛的不同位置(大部分需要四個鏡頭即可),以獲得全方位的影像資料。在影像合成演算法方面,則需要將相機拍攝到的多個影像進行智能化合成,包括圖像校正、拼接、配合顯示器顯示等多個步驟。在顯示器方面,一般採用車機平板甚至虛擬實境顯示器等,以提供更加真實、立體的影像體驗。
車用環景系統的實現,需要在多個技術上取得平衡。例如,相機的數量越多,車用環景系統的全景畫面拼接越符合真實情況,但同時也會增加系統的成本和複雜度。而在影像合成演算法方面,需要綜合考慮圖像校正、拼接的精度、演算法的運算速度等多個因素。在顯示器方面,則需要綜合考慮顯示器的尺寸、解析度、亮度等因素,以提供更加真實、舒適的影像體驗。
總體來說,車用環景系統的實現需要多方面的技術支持包括相機、影像合成演算法以及顯示器等方面,同時作為商用產品需要綜合考慮成本、複雜度、真實性等。
2.車用環景系統所用到的空間資訊技術及原理
車用環景系統所用到的技術主要為:「攝影測量」
首先需要對拍攝的影像進行影像處理,影像處理是指對車載攝像頭拍攝到的原始影像進行處理和增強,提高圖像質量,增加系統的穩定性和可靠性。這包括對圖像進行去噪、平滑、增強、色彩校正、形態學處理等操作,以使圖像更加清晰、明亮和自然。
再來進行影像拼接,影像拼接是指將多個攝像頭拍攝到的部分圖像進行拼接,形成一個完整的、無縫的全景圖像。實現影像拼接的主要方法包括特徵檢測和匹配、圖像配準和重投影等。其中,特徵檢測和匹配是最基本的步驟,通過檢測圖像中的關鍵點,進行特徵描述,進而實現多張圖像的匹配,最終實現圖像的拼接。
其中影像拼接的過程序要用到攝影測量的相關概念,包括了計算各個相機的內外參數,內參數包括了像主點坐標、焦距、畸變差參數等,後者則是相機在拍攝當下的姿態(各軸旋轉角)以及位置參數(x,y,z位置)。常見的計算方法為透過率定標進行定位
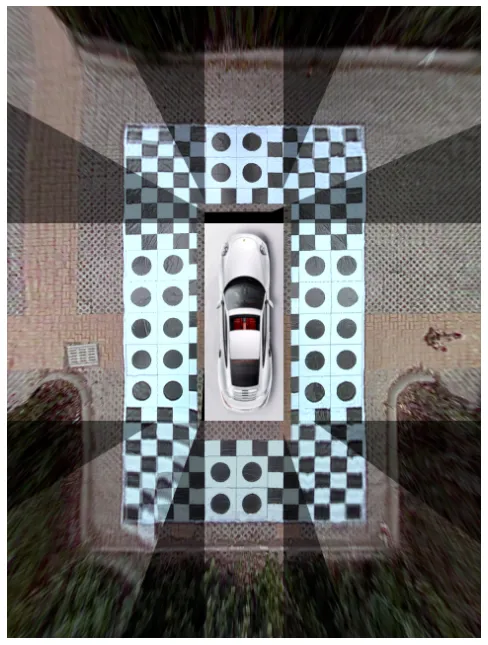
透過率定標提供明顯的標定物,用來計算各個鏡頭間的內外參數以及投影矩陣參數,藉此將所有的鏡頭轉換至一致的坐標系統,最後將各鏡頭的重疊影像進行融合拼接即可以得到環景影像。
3.目前商用環景技術的優點及缺點比較
鏡頭式環景技術:
優點:
- 可以實現360度全景拍攝,拼接效果好
- 可以實現3D重建,可以精確測量距離和尺寸
- 鏡頭可以遠端控制和操作,實用性較高
缺點:
- 設備成本高,需要較多的鏡頭和高性能計算設備
- 拍攝過程中需要光線穩定,且需要調節相機參數
- 拍攝範圍受限於鏡頭視角
光達式環景技術:
優點:
- 可以實現高精度的距離和深度測量
- 可以實現三維重建和點雲拼接,效果更加逼真
- 可以進行智能分析和識別,具有潛在的安全應用
缺點:
- 設備成本高,需要較多的激光雷達傳感器和更高性能的計算設備
- 對光線和天氣環境有一定的限制
- 系統體積較大,安裝和維護複雜
相關參考資料
https://zhuanlan.zhihu.com/p/568897378
https://blog.csdn.net/lwx309025167/article/details/120096776
看更多
![]iPhone必學!三秒完成報案求救-快速報案、自動傳送案發點](https://www.spatialgeolab.com/wp-content/uploads/2024/06/image-101.png)